

Glen Ames
FLL Robotics team training 2026
Class # 1
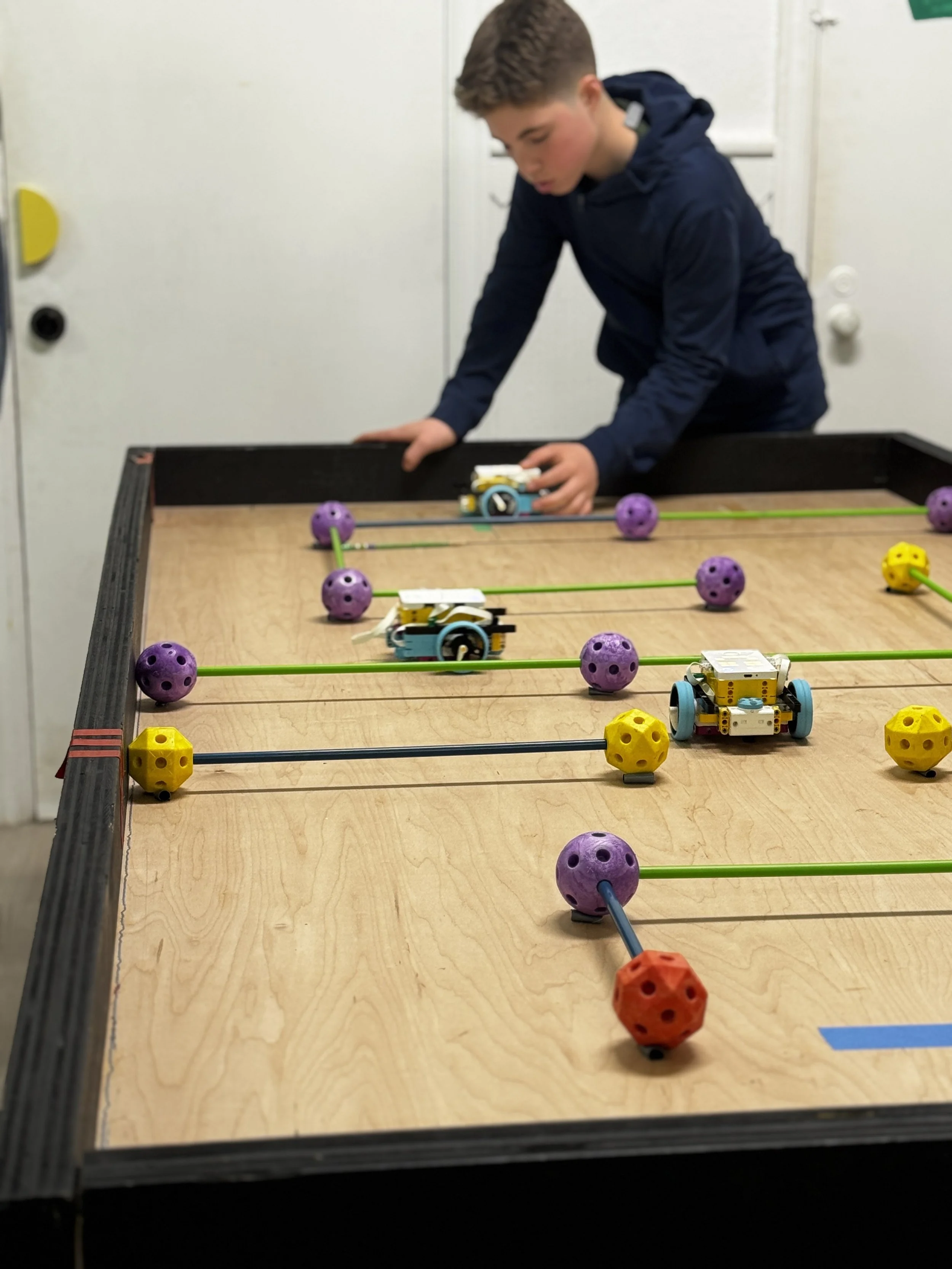
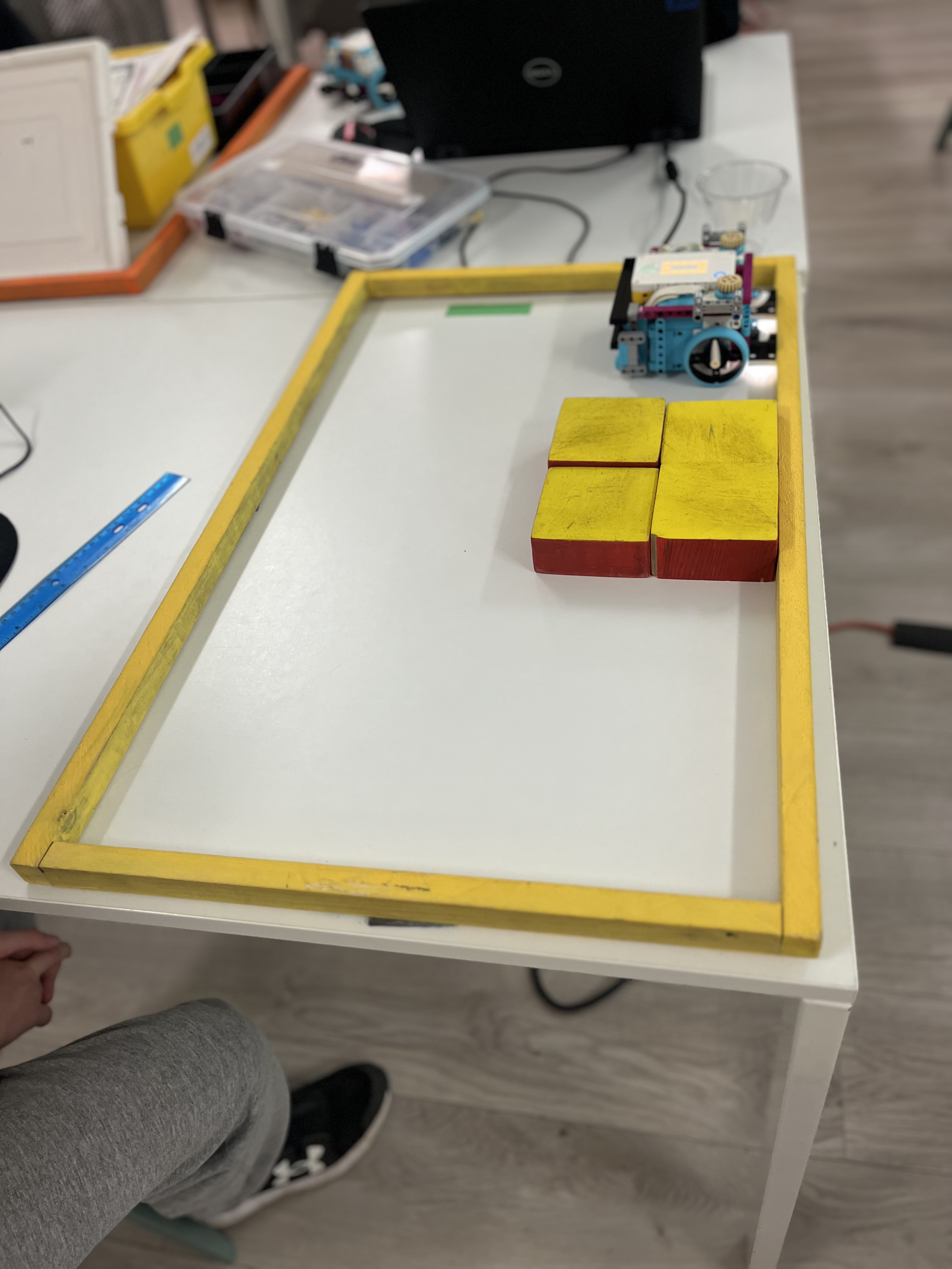
An introduction lesson featuring each part of the robot and how it functioned! After learning the basics, we built the base driving robot and coded it, experimenting with 90° turns. With our bot programmed, we navigated it throughout a maze from start to finish without error! 🤖 ⚡
Class # 2
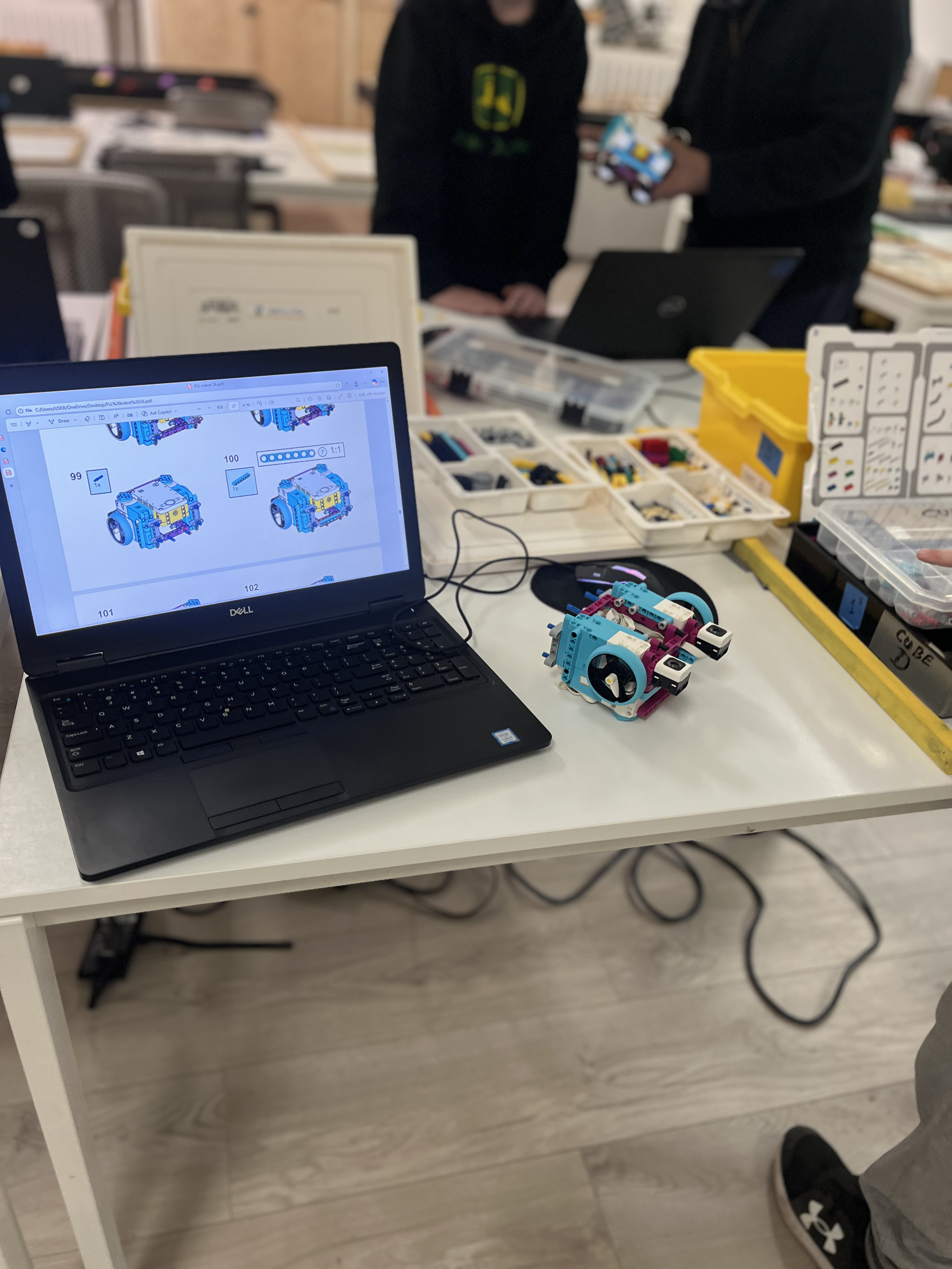
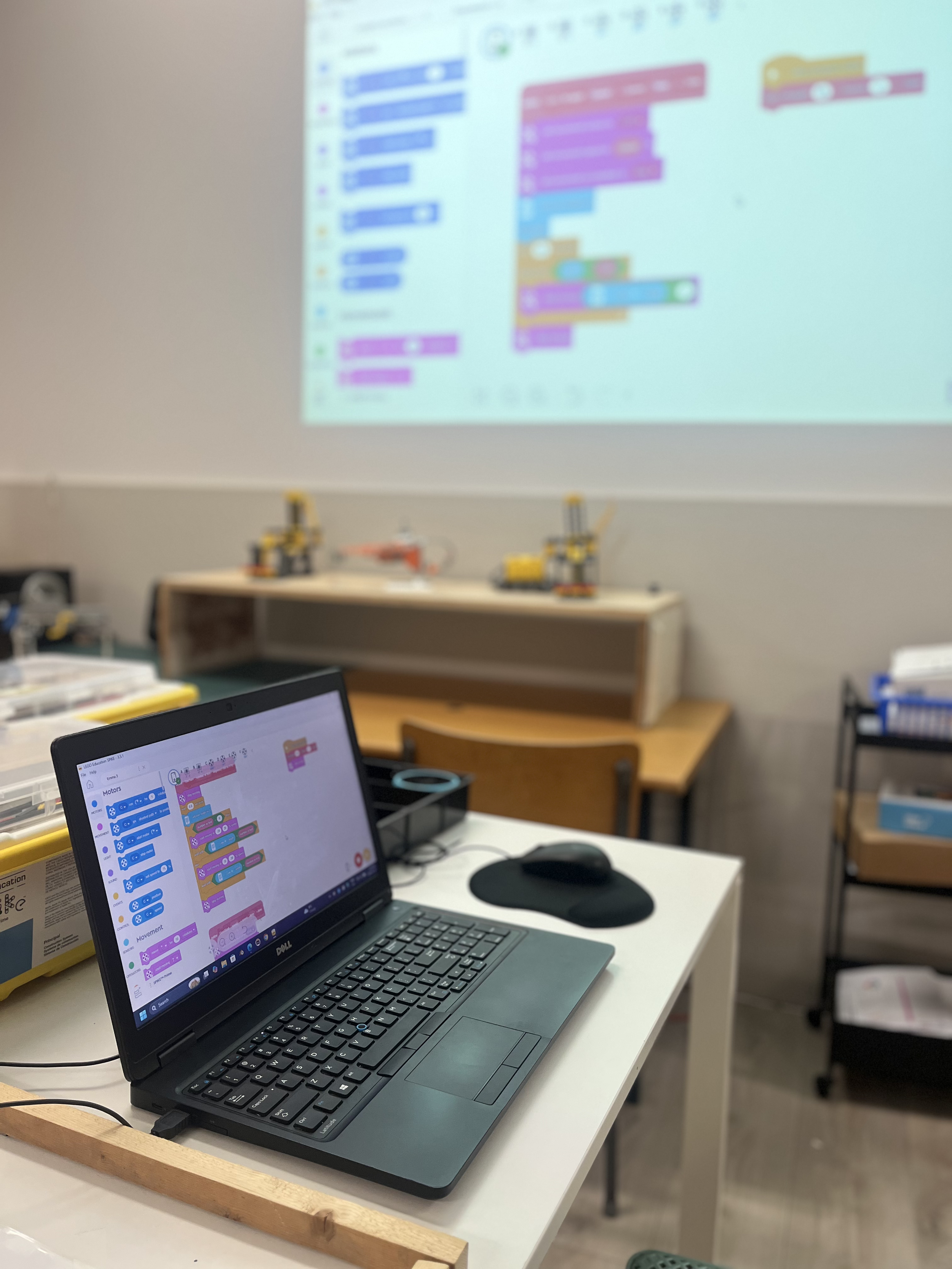
Following building instructions, we created our robots while ensuring tidy wire management! 🔌 After going over our corner turns from last week, we learnt how to turn left and right backwards. Once we tidied up our building areas, we developed our code and then navigated our bots through a variety of tough challenges! 💪 🎯
Class # 3
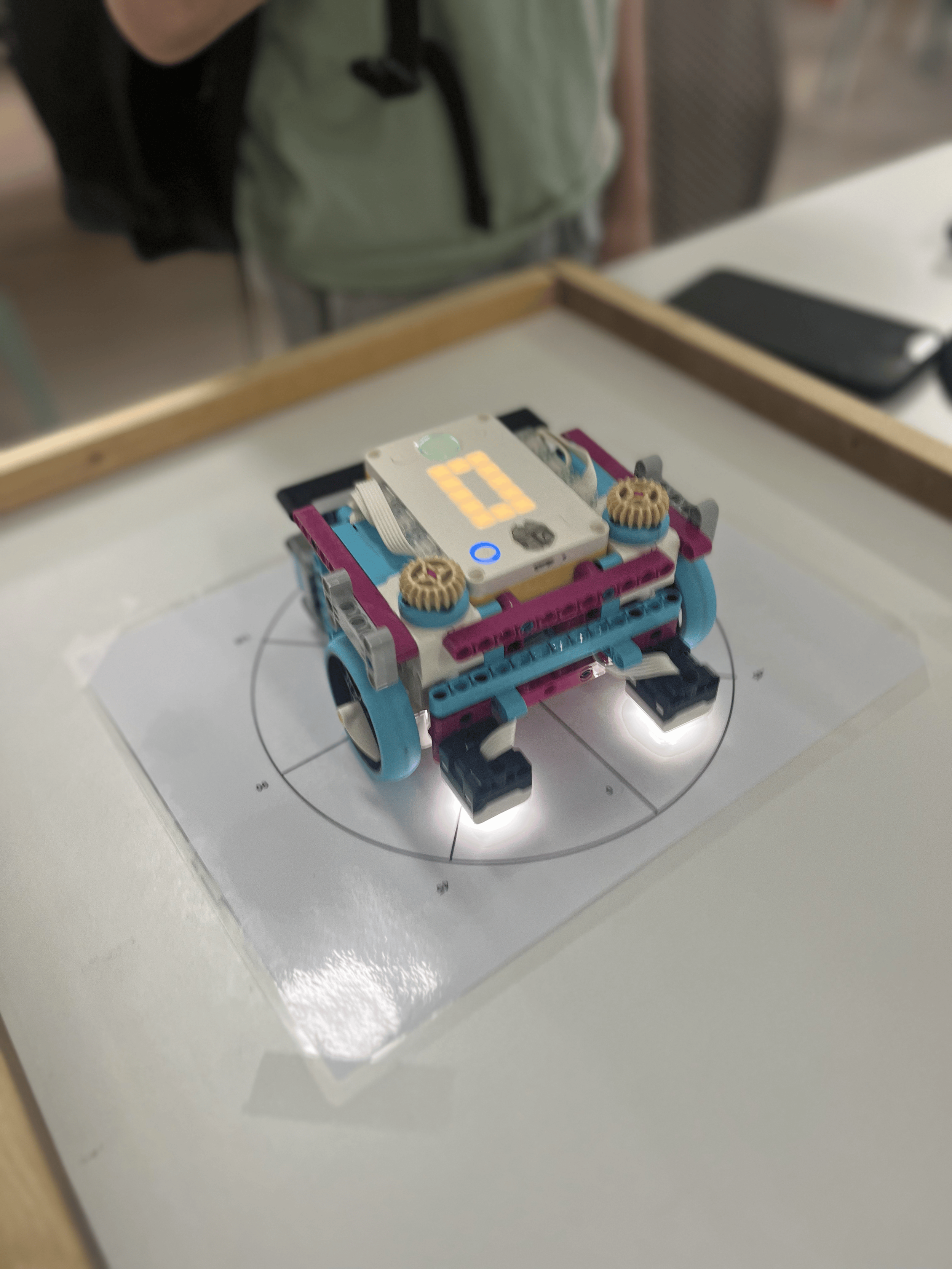
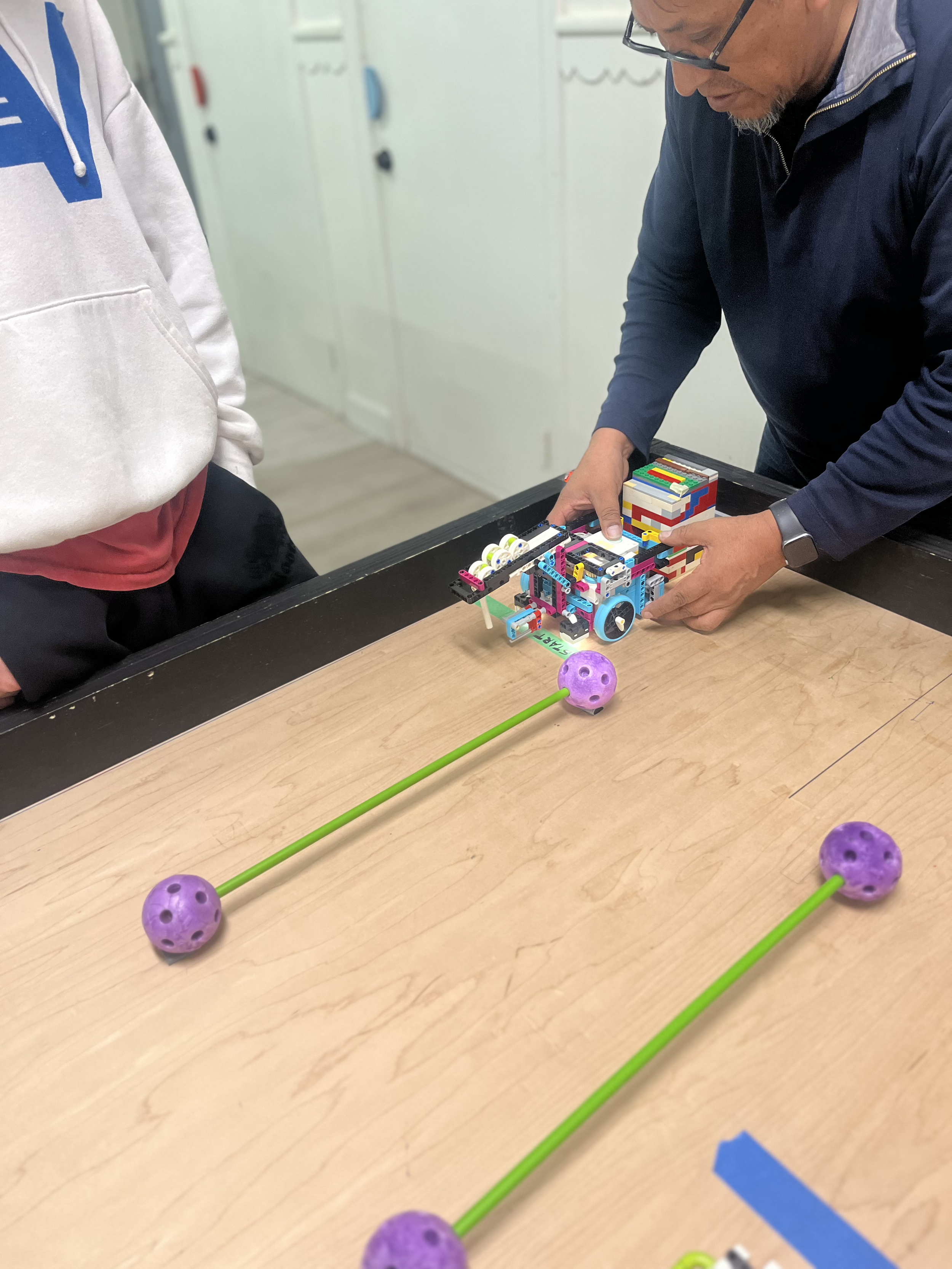
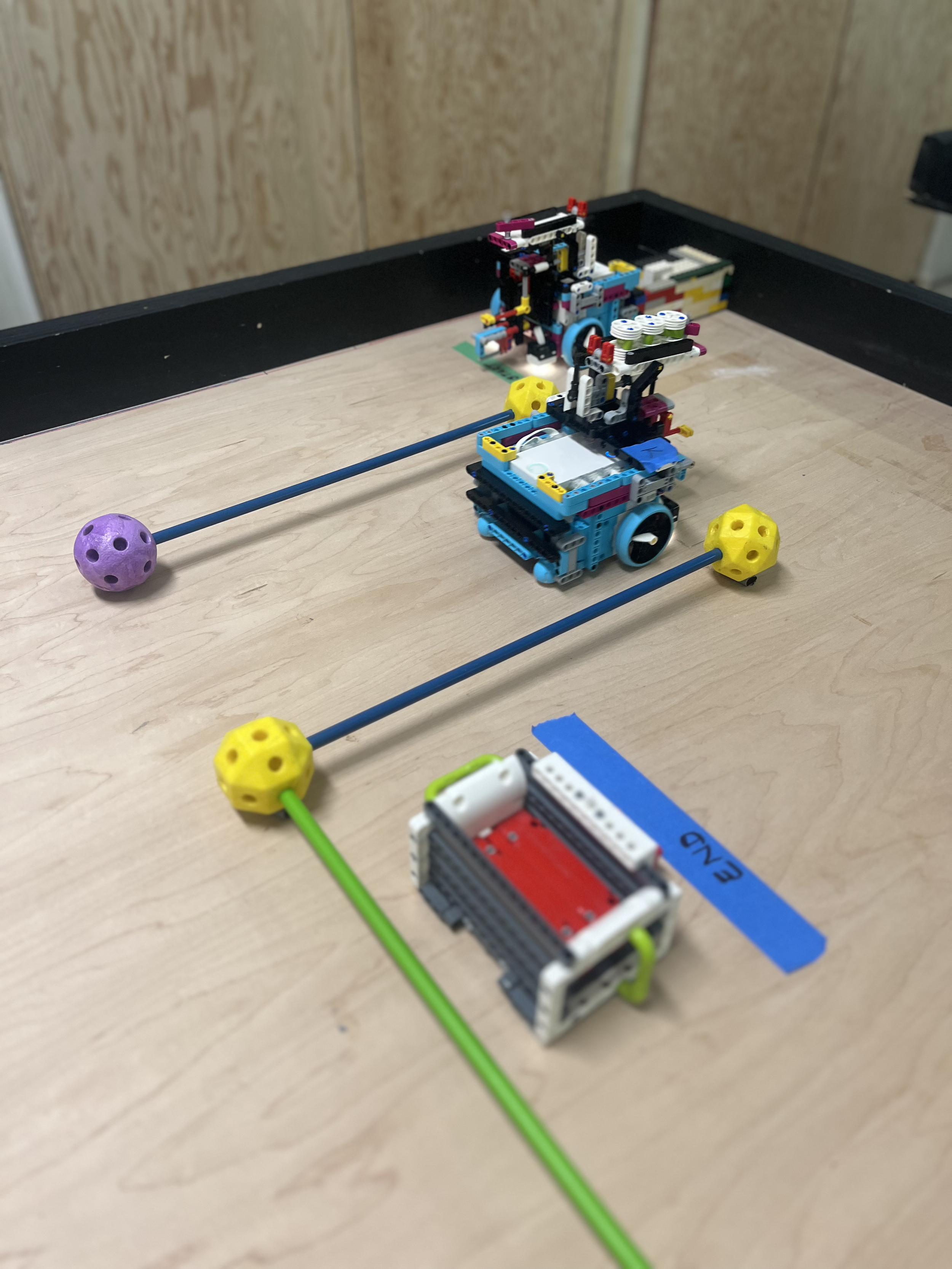
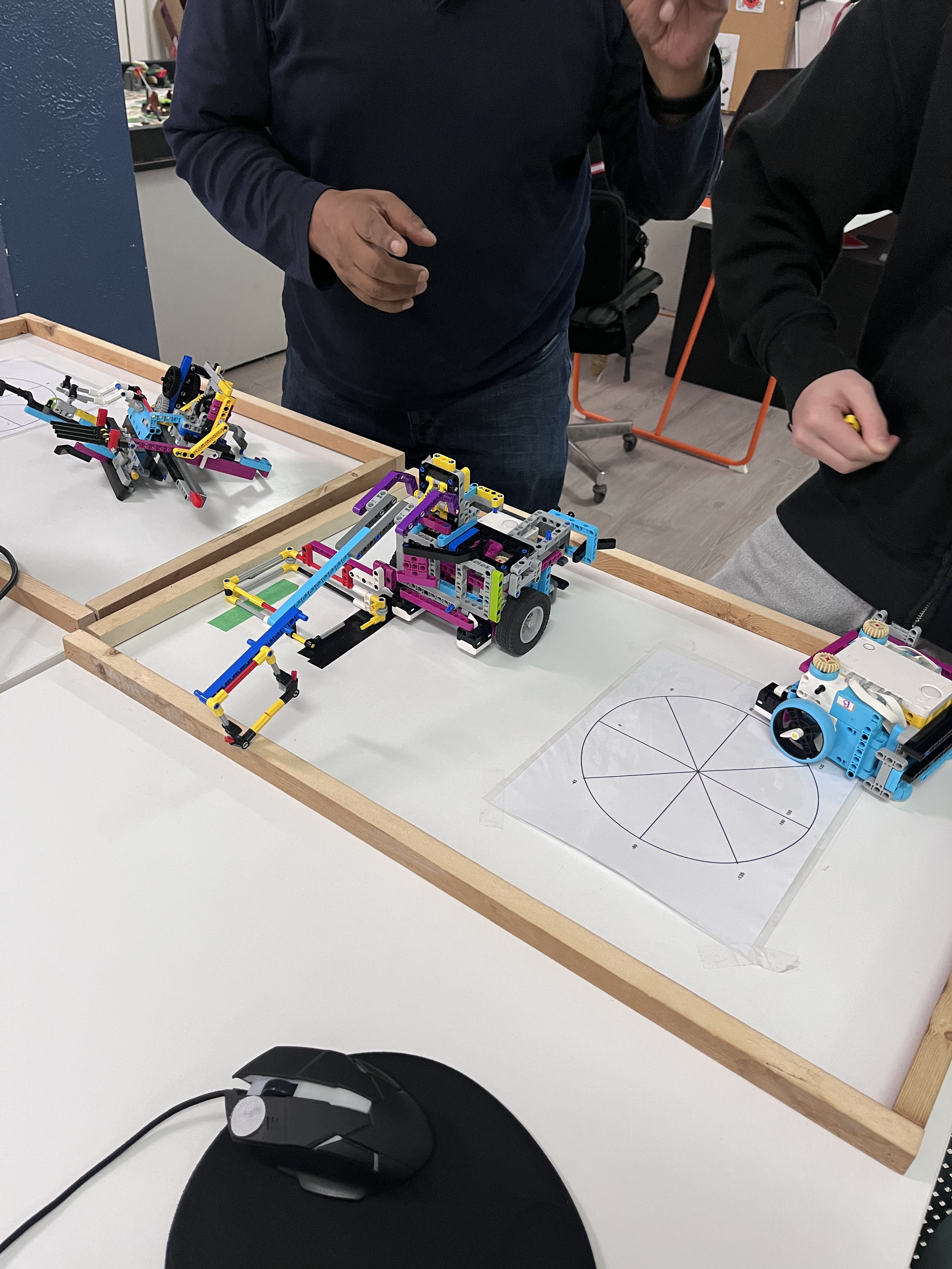
Today, we discussed the Gyro Sensor and how to use it. After building our robot, we included a display that demonstrated which direction it faced! 💡 By placing our bot on top of a circle with degrees, we tested the Sensor. Upon applying further modifications and new code, we used our new robots in a difficult challenge with two goals: to interact with an object and to reach the finish line! 🏁 🦾
Class # 4
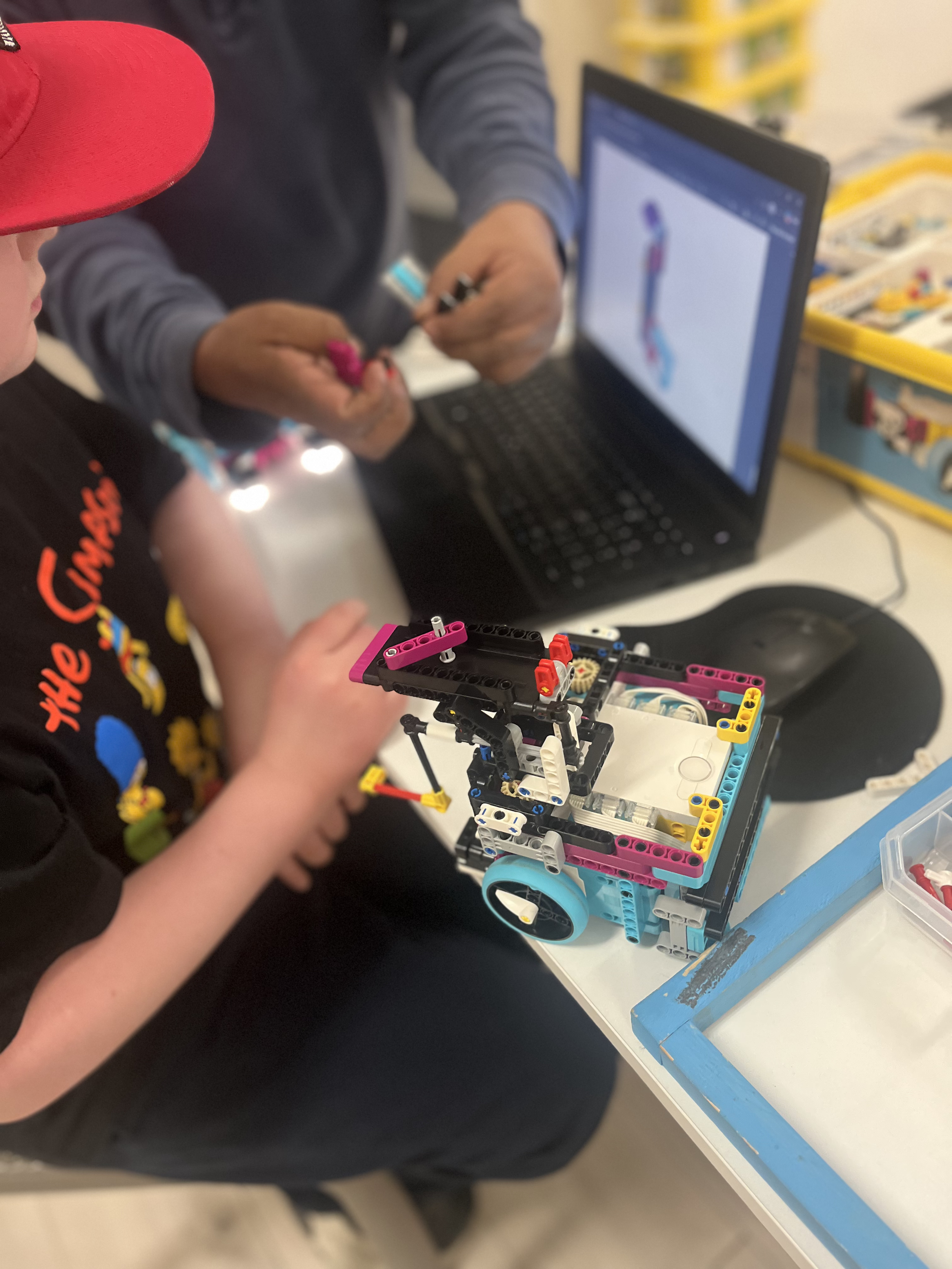
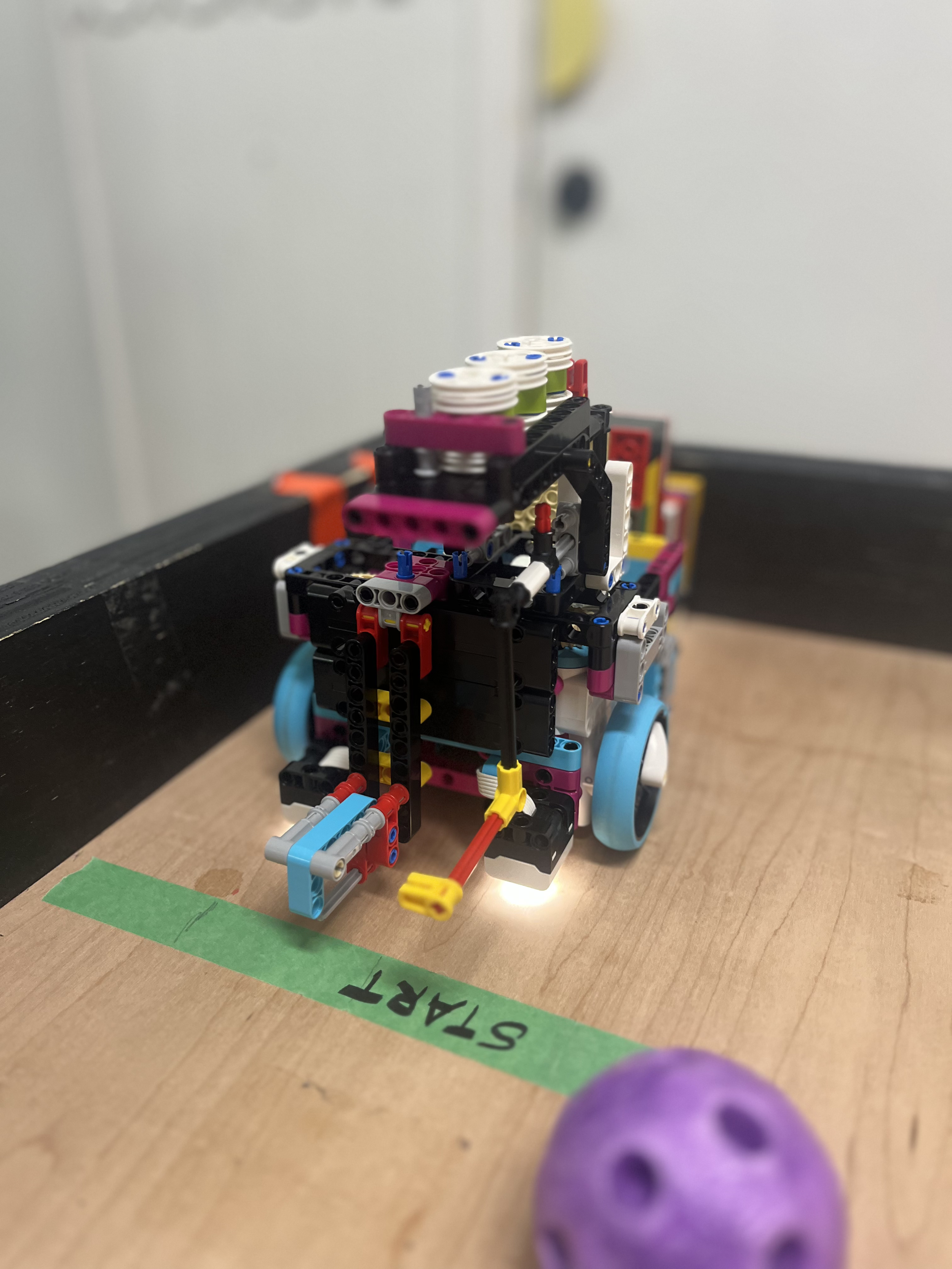
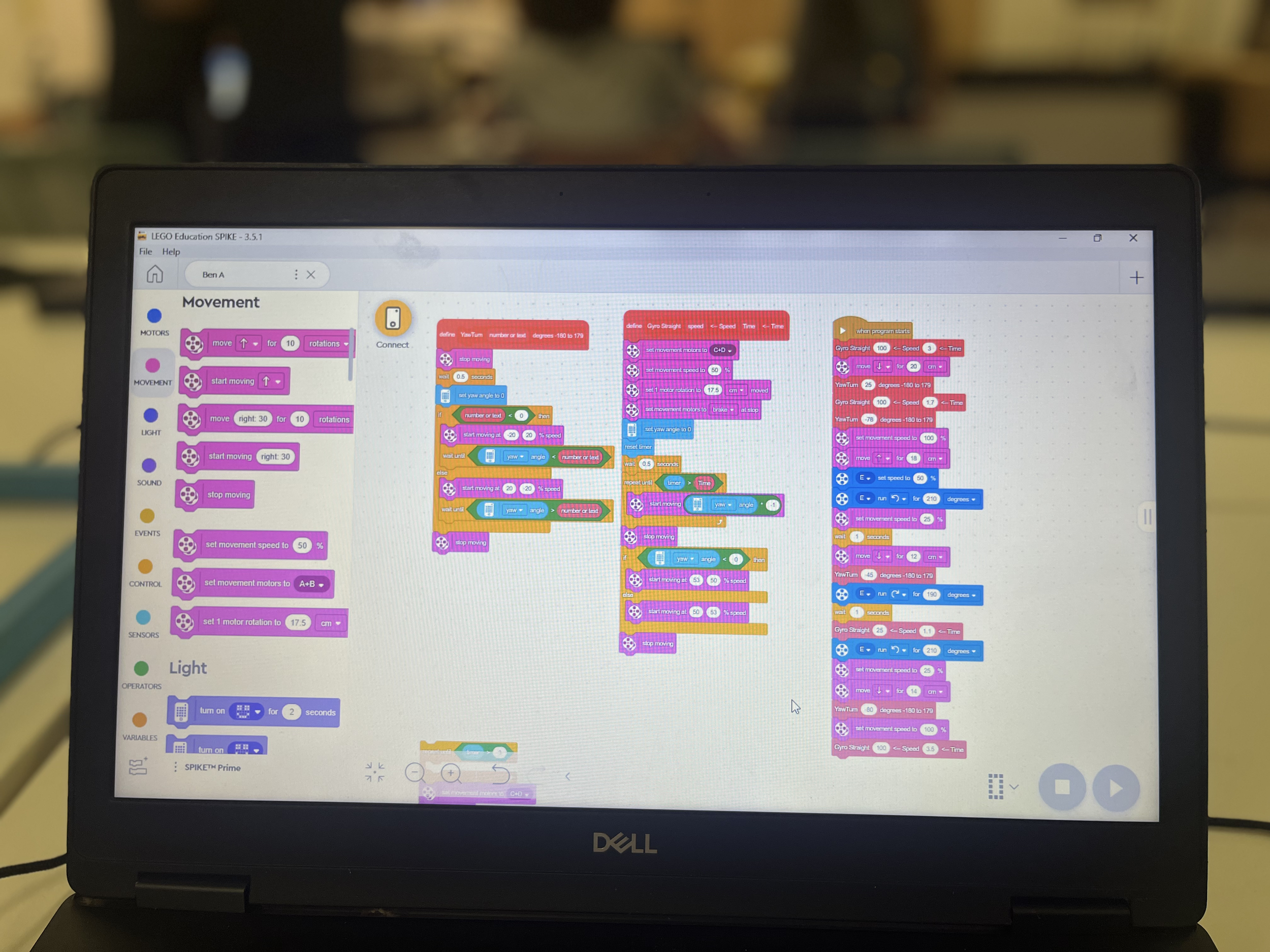
Today’s challenge involved solving puzzles with our robot while continuing to a finish line. 🧩 However, to complete such exercises, our bot needed a few upgrades — passive attachments. ⏫ 🔧 Following the building instructions, we built these attachments and connected them to our robots, ensuring we could complete the challenge. We also created code involving yaw and gyro, which significantly improved our workflow! 💻
Class # 5
We fixed errors in our previously built attachments to ensure they would succeed during the challenge! 🏆 Our code from last week was tweaked, with the yaw and gyro code finalized. Through trial and error, and with help and cooperation from friends, we managed to overcome the challenge! 🤜🤛
Class # 6
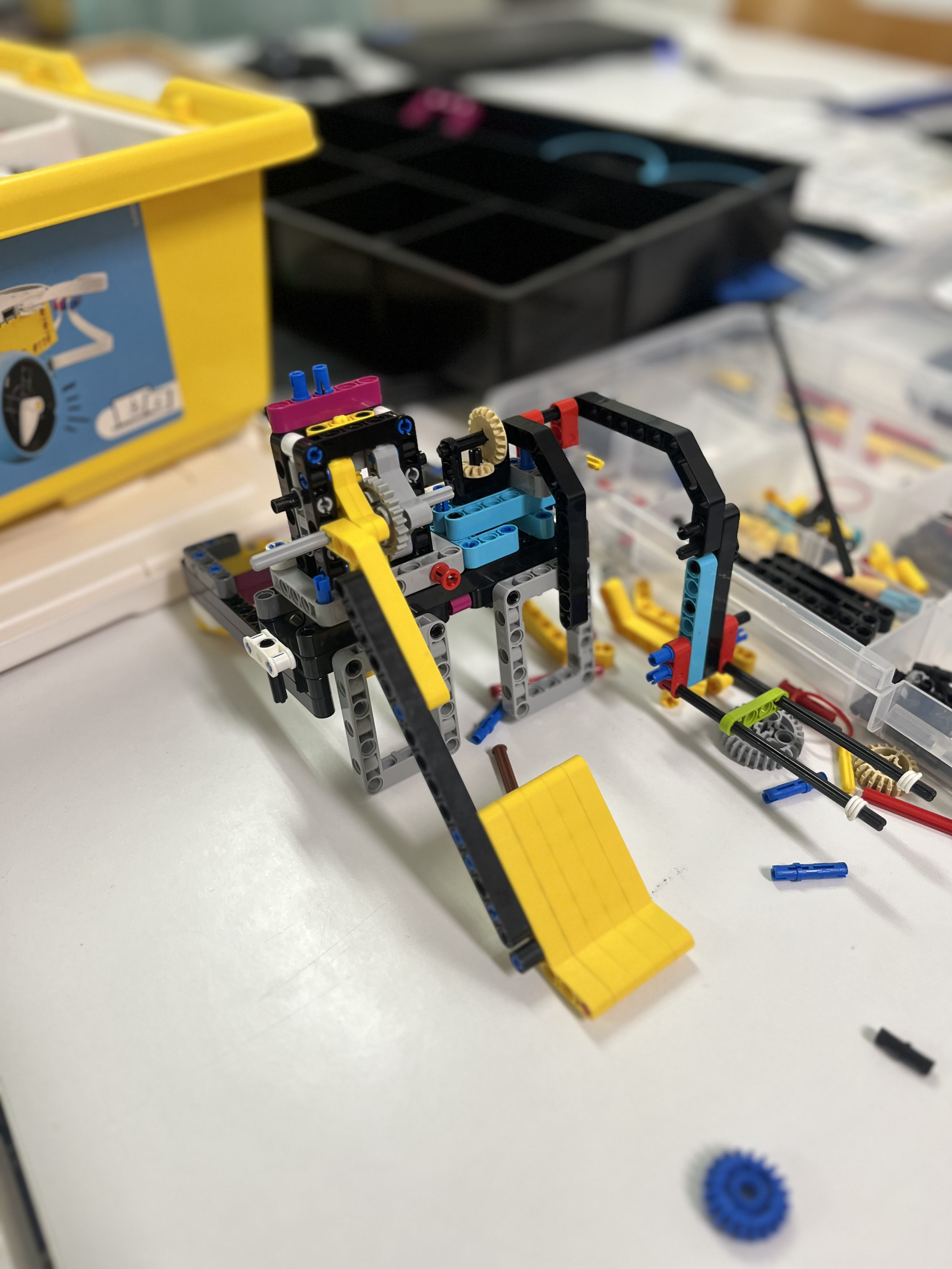
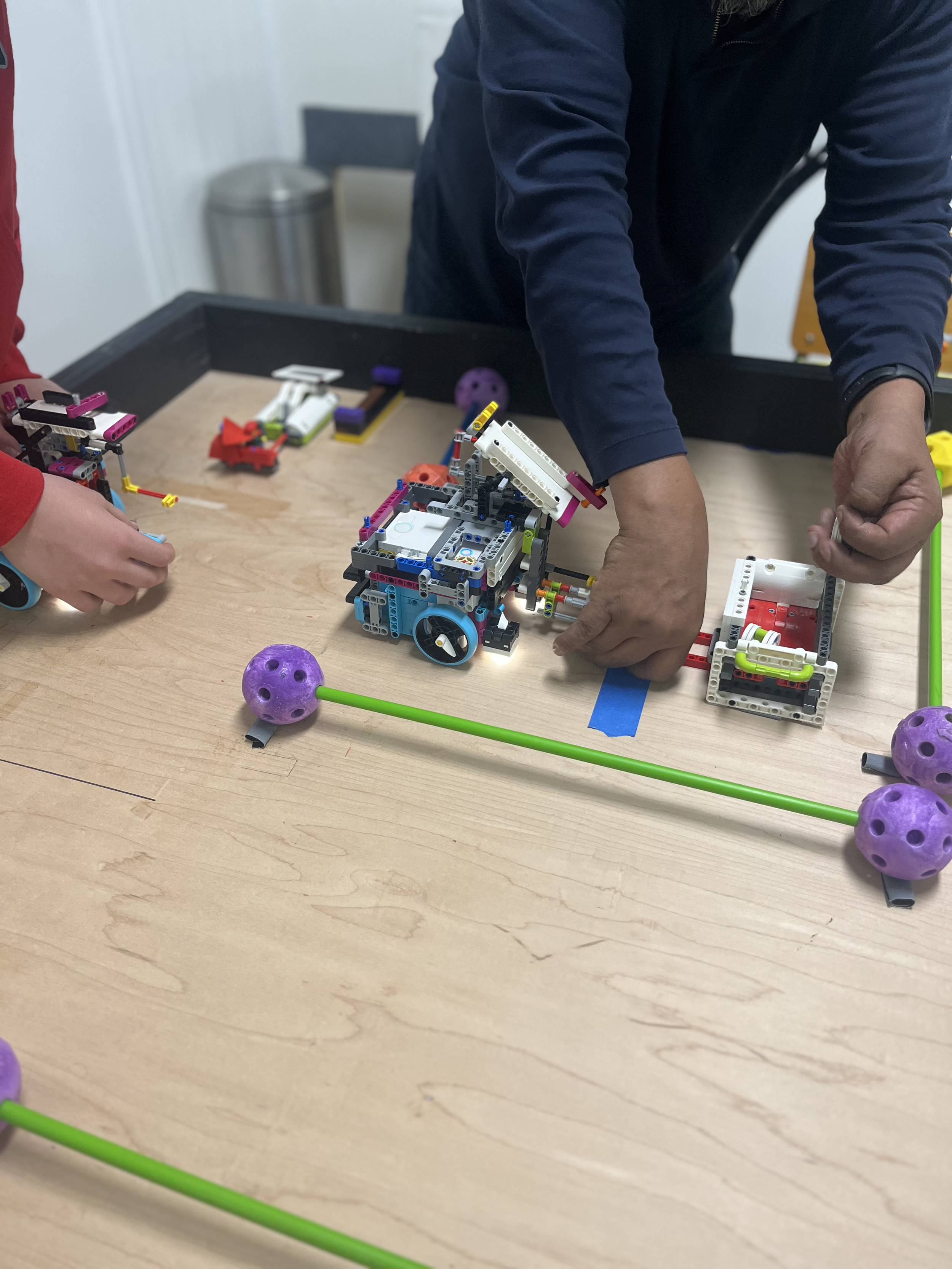
Real Missions: Our students began with a larger build and have now added a new active attachment. They collaborated closely with their teammates to accomplish today’s challenge using rack-and-pinion mechanisms. 🤝 Together, they completed Missions 1 and 2 from the Unearthed theme for the 2025 FIRST Lego League! 🎯


Class # 7
New missions from the Unearthed theme were taken on today! 🧱 We improved our attachments so they could complete multiple actions at once, such as pushing, pulling, and lifting! ⚡ Using the provided in examples, we ensured our code was within competition standards. With strong teamwork, the groups made impressive progress!

Class # 8
Groups focused on different missions, causing them to create distinct attachments with varying code, involving Yaw Turn and Gyro Straight. Through trial and error and strong teamwork, many of the Unearthed Challenges were completed! 🪨 🎉

Class # 9
This time, the teams were presented with a model missing instructions. After analyzing and testing the attachment, they built it themselves without guidance. Together, groups started engineering their robots to complete Missions 3 and 4! ⚙️ 🛠️


Class # 10
In today’s final class, several groups utilized previous attachments to complete missions! 🏁 Others quickly built new attachments and created fresh code in turn, competing against time to succeed. Referring to the score board below, you can view the team standings! 🏆

scores
Below is the score of each team. Points are awarded per completion of missions.
gallery







Location:
📍 Location: Beaches Presbyterian Church (Lower level)
🏠 Address: 65 Glen Manor Drive, Toronto
Please enter through the door where our signage is located.
✉️ For inquiries, email us contact@thecubespace.net